|
Flair
Framework Libre Air
|
|
Flair
Framework Libre Air
|
Base class for brushless motors drivers. More...
#include <Bldc.h>
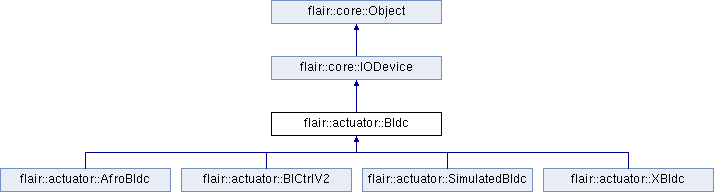
 Inheritance diagram for flair::actuator::Bldc:
Inheritance diagram for flair::actuator::Bldc:Public Member Functions | |
| Bldc (const core::IODevice *parent, gui::Layout *layout, std::string name, uint8_t motors_count) | |
| Constructor. More... | |
| Bldc (const core::Object *parent, std::string name, uint8_t motors_count) | |
| Constructor. More... | |
| ~Bldc () | |
| Destructor. More... | |
| void | LockUserInterface (void) const |
| Lock user interface. More... | |
| void | UnlockUserInterface (void) const |
| Unlock user interface. More... | |
| void | UseDefaultPlot (gui::TabWidget *tabwidget) |
| Use default plot. More... | |
| core::Matrix * | Output (void) const |
| Output from motors. More... | |
| uint8_t | MotorsCount (void) const |
| Motors count. More... | |
| void | SetEnabled (bool status) |
| Enable motors. More... | |
| bool | AreEnabled (void) const |
| Are motors enabled? More... | |
| void | SetPower (int motor_id, float value) |
| Set motor power. More... | |
| gui::Layout * | GetLayout (void) const |
| Layout. More... | |
| virtual bool | HasSpeedMeasurement (void) const =0 |
| Has speed measurement. More... | |
| virtual bool | HasCurrentMeasurement (void) const =0 |
| Has current measurement. More... | |
| Public Member Functions inherited from flair::core::IODevice | |
| IODevice (const Object *parent, std::string name) | |
| Constructor. More... | |
| virtual | ~IODevice () |
| Destructor. More... | |
| void | AddDeviceToLog (const IODevice *device) |
| Add an IODevice to the logs. More... | |
| void | AddDataToLog (const io_data *data) |
| Add an io_data to the log. More... | |
| void | OutputToShMem (bool enabled) |
| Send the output to a shared memory. More... | |
| bool | IsReady (void) const |
| is device ready More... | |
| virtual DataType const & | GetInputDataType () const |
| virtual DataType const & | GetOutputDataType () const |
| Public Member Functions inherited from flair::core::Object | |
| Object (const Object *parent=NULL, std::string name="", std::string type="") | |
| Constructor. More... | |
| virtual | ~Object () |
| Destructor. More... | |
| std::string | ObjectName (void) const |
| Name. More... | |
| std::string | ObjectType (void) const |
| Type. More... | |
| const Object * | Parent (void) const |
| Parent. More... | |
| std::vector< const Object * > * | TypeChilds (void) const |
| Childs of the same type. More... | |
| std::vector< const Object * > * | Childs (void) const |
| Childs. More... | |
| void | Information (const char *function, int line, const char *format,...) const |
| Formatted information. More... | |
| void | Warning (const char *function, const char *format,...) const |
| Formatted warning. More... | |
| void | Error (const char *function, const char *format,...) const |
| Formatted error. More... | |
| bool | ErrorOccured (bool recursive=true) const |
| Has an errror occured? More... | |
Protected Attributes | |
| core::Matrix * | output |
Additional Inherited Members | |
| Public Types inherited from flair::core::Object | |
| enum | color_t { Auto = 0, Red = 31, Green = 32, Orange = 33 } |
| Protected Member Functions inherited from flair::core::IODevice | |
| void | ProcessUpdate (io_data *data) |
| Process the childs of type IODevice, and log if needed. More... | |
| void | SetIsReady (bool status) |
| set is ready More... | |
Base class for brushless motors drivers.
| flair::actuator::Bldc::Bldc | ( | const core::IODevice * | parent, |
| gui::Layout * | layout, | ||
| std::string | name, | ||
| uint8_t | motors_count | ||
| ) |
Constructor.
Construct a Bldc.
| parent | parent |
| layout | layout |
| name | name |
| motors_count | number of motors |
| flair::actuator::Bldc::Bldc | ( | const core::Object * | parent, |
| std::string | name, | ||
| uint8_t | motors_count | ||
| ) |
Constructor.
Construct a Bldc.
This contructor must only be called for a simulated device.
| parent | parent |
| name | name |
| motors_count | number of motors |
| flair::actuator::Bldc::~Bldc | ( | ) |
Destructor.
| void flair::actuator::Bldc::LockUserInterface | ( | void | ) | const |
Lock user interface.
| void flair::actuator::Bldc::UnlockUserInterface | ( | void | ) | const |
Unlock user interface.
| void flair::actuator::Bldc::UseDefaultPlot | ( | gui::TabWidget * | tabwidget | ) |
Use default plot.
| tabwidget | TabWidget to draw plots |
| core::Matrix* flair::actuator::Bldc::Output | ( | void | ) | const |
Output from motors.
First column is real speed if available, secund column is current if available
| uint8_t flair::actuator::Bldc::MotorsCount | ( | void | ) | const |
Motors count.
| void flair::actuator::Bldc::SetEnabled | ( | bool | status | ) |
Enable motors.
| true | to enable all motors |
| bool flair::actuator::Bldc::AreEnabled | ( | void | ) | const |
Are motors enabled?
| void flair::actuator::Bldc::SetPower | ( | int | motor_id, |
| float | value | ||
| ) |
Set motor power.
Changes the power (from 0 to 1) of a specific motor.
By default power is set to 1 for each motor which has no effect.
A value <1 will decrease the power of a motor sent to the reimplemented Bldc class through SetMotors.
The power value is applied after applying saturation between min value and max value. So the resulting value cannot be higher than max value but it can be lower than min value.
| motor_id | id of the motor |
| value | power value (from 0 to 1) |
| gui::Layout* flair::actuator::Bldc::GetLayout | ( | void | ) | const |
Layout.
This the same Layout as passed to the constructor
|
pure virtual |
Has speed measurement.
Implemented in flair::actuator::BlCtrlV2, flair::actuator::AfroBldc, flair::actuator::SimulatedBldc, and flair::actuator::XBldc.
|
pure virtual |
Has current measurement.
Implemented in flair::actuator::BlCtrlV2, flair::actuator::AfroBldc, flair::actuator::SimulatedBldc, and flair::actuator::XBldc.
 1.8.9.1
1.8.9.1